

— それではこの度刷新されたFoveon X3 SENSOR Quattroについてお聞かせください。従来の垂直色分離方式に変わりはありませんが、輝度情報をトップレイヤー(B層)のみで取得し、ミドルレイヤー(G層)とボトムレイヤー(R層)では、トップレイヤー4画素分をちょうど1画素にクリッピングしたような形に変更となっています。このように大きな変更に至った経緯と、従来品との違いなどをお聞かせいただけないでしょうか。
[ 山木社長 ]
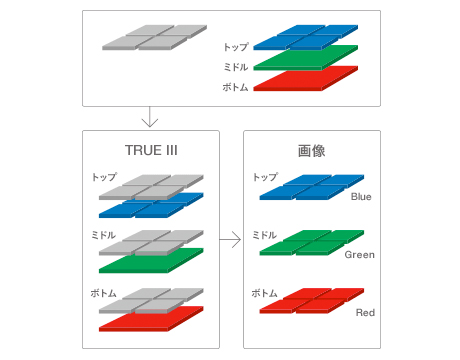
開発途中のため最終的な画は調整中ですが(注:インタビューで伺った3月当時のお話です)、基本的にはX3センサーが出す画と質感は同じです。Merrillセンサーでは約1,500万画素(ベイヤー換算3,000万画素相当)でしたが、Quattroセンサーではトップレイヤーが1,960万画素と画素数がアップしました(ベイヤー換算3,900万画素相当)。トップは4画素・ミドルとボトムは1画素ですから、伝統的なRGBの順番で言えば1:1:4の配列になります。トップレイヤーはブルーの色情報の他に輝度情報を取得し、ミドルとボトムのレイヤーはグリーンとレッドの色情報を取得する。このような構造になった理由は、2,000万画素の情報を3層で取得すると6,000万画素相当という膨大なデータ量になってしまうからですね。従来のR:G:B = 1:1:1の配列で解像度を上げれば処理時間も消費電力も大きくなってしまうところを、R:G:B = 1:1:4の配列にすることで抑えることができました。解像度を上げつつデータ量を抑え込むための着想でしたが、ミドル・ボトムレイヤーでは4画素を1画素にまとめることでフォトダイオードの大きさが物理的に大きくなり、S/N比が改善して若干ながら高感度特性も良くなっています。
— なるほど。解像度を上げつつ、同時に合理化も行っているわけですね。
[ 山木社長 ]
Quattroセンサーで維持したかったのは、リアリティのある解像感。Foveonセンサーの最大の特長は、解像感の高さからもたらされるディティールの豊かさです。ベイヤー型のセンサーではR:G:B = 1:2:1とサンプリング周波数がそれぞれ異なるため、被写体の色の具合によって解像しているところと解像していないところのムラが出てしまいますが、FoveonセンサーではR:G:B = 1:1:1。Foveonセンサーがムラのない「リアリティのある解像感」を生み出せる根拠になっています。Quattroセンサーではこの最大の特長はそのままに、仰るとおり、解像度を上げつつ合理化も図ることができました。
— トップレイヤー(B層)だけで輝度情報を取得する仕組みについて、もう少し詳しく聞かせてください。
[ 山木社長 ]
Foveonセンサーの色の分光特性では、トップレイヤーのブルーは、グリーンやレッドの方までカバーするほどに感度が広いのですね。その特性を活かして、トップレイヤーのブルーで全レイヤーの輝度情報を取得しています。よく質問されるのは「4画素を1画素に括ってしまうことで、ミドル・ボトムレイヤーは色解像度が落ちているのではないか?」ということなのですが、輝度が取得できていれば問題ありません。トップレイヤーで色の他に輝度情報を取得し、グリーンとレッドの色情報にその輝度情報を付加して画像を生成し、画像としてはR:G:Bが1:1:1の情報量となっています。ベイヤー型センサーのようにロケーション(補完しているピクセルの位置)がズレているわけではなく、後から情報を復元させているイメージです。ある意味、ピクセル構造的にはR:G:B = 4:1:1のロスレス圧縮をしていて、画像処理の段階で解凍してR:G:B = 4:4:4になるといった具合です。
(トップレイヤーで取得した輝度情報をそのまま下層レイヤーにロケーションのズレなく当てはめるわけですから、データ量を抑制しつつ、トップレイヤーと同じ量のデータをリアルに回復可能。なかなかシンプルかつ理に適った仕組みですね。)