

- Next, let me ask you about the new Foveon X3 SENSOR Quattro. It continues to employ the vertical separation technology, but this new sensor acquires luminance information only on the top layer (B layer) and in a way, the four pixels from the top layer are cropped to one pixel on the middle (G) and the bottom (R) layers. Could you tell me what led to this big change and how it is different from the former model?
[ Mr. Yamaki ]
Although we're still making final adjustments of image processing (as of March, when we interviewed them), texture reproduction isn't different from the X3 sensor basically. While the Merrill sensor has approximately 15 megapixels (equivalent to 30 megapixels of a bayer sensor), the top layer of the Quattro sensor has 19.6 megapixels (equivalent to 39 megapixels of a bayer sensor). The top layer uses four pixels while the middle and the bottom layers use one pixel. So, in a traditional RGB order, it's a ratio of 1:1:4. The top layer captures luminance information as well as blue color information while the middle and the bottom layers acquire only green and red color information respectively. We employed this structure because we wanted to reduce the data volume. If each layer had 20 megapixels, then the camera needs to process the data as large as 60 megapixels, which is time and energy consuming. But, we could avoid it by using the R:G:B=1:1:4 ratio. It's an idea to realize both higher resolution and restraining the amount of data processing. And, this brought another merit. By combining four pixels to make one pixel in the middle and the bottom layers, we could enlarge the photodiode size, which then improved S/N ratio and high sensitivity performance.
- I see. You've done two things at once. Increasing resolution and streamlining data processing.
[ Mr. Yamaki ]
We wanted to maintain the realistic resolution on the Quattro sensor. The top feature of the Foveon sensor is the rich detail realized by the high resolution. As for the bayer sensor, it uses the R:G:B=1:2:1 ratio and they have different sampling frequencies. This causes the resolution gap depending on colors of the subjects. But, the Foveon sensor uses the R:G:B=1:1:1 ratio and this warrants the nonuniformity-free "realistic resolution." The Quattro sensor maintains this feature, and yet, as you mentioned, it realized higher resolution while rationalizing data processing.
- Could you talk more about how it acquires the luminance information only with the top layer (B layer)?
[ Mr. Yamaki ]
In terms of the spectral characteristics of the Foveon sensor, the sensitivity of the top blue layer (not pure blue, but dull blue) is so high that it can also cover the job of the green and the red layers. So, we took advantage of it and assigned the blue layer to acquire the luminance information for all layers. People often ask if the color resolution of the middle and the bottom layers could be lowered when the four pixels were bound into one pixel. But, as long as the luminance information is captured, there's no problem. The top layer gathers the color and the luminance information, and the image is generated by adding the luminance information to the green and the red color information. As a result, the image is composed by the R:G:B=1:1:1 information. Unlike the bayer sensor, there's no dislocation of supplementing pixels. Instead, it recovers the information afterwards. In a sense, and in terms of pixel structure, it does a R:G:B=4:1:1 lossless compressing, and extracts it at the image processing stage to make it a R:G:B=4:4:4.
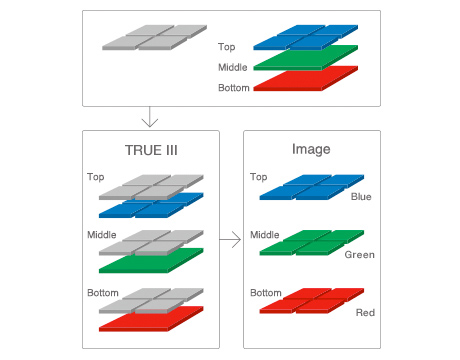
(Since the luminance information acquired by the top layer is directly applied to the lower layers without dislocation, it can restrain the data quantity while recover the amount of data from the top layer without loss. It sounds so simple, but makes sense, doesn't it?)